In [1]:
import time
import math
import random
import rasterio
import cv2
import matplotlib.pyplot as plt
import numpy as np
from skimage import color
from skimage import io
from skimage import data, img_as_float
import os
import glob
import mahotas as mt
from sklearn.neighbors import KNeighborsClassifier
import pandas as pd
Ex.1¶
1.1 - Loading image¶
In [2]:
!ls UCMerced_LandUse/Images/intersection
In [3]:
img_rgb = cv2.imread('UCMerced_LandUse/Images/intersection/intersection00.tif',1)
plt.imshow(img_rgb)
plt.show()

In [4]:
# convert to grayscale
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
plt.imshow(img_gray,cmap="gray")
plt.show()

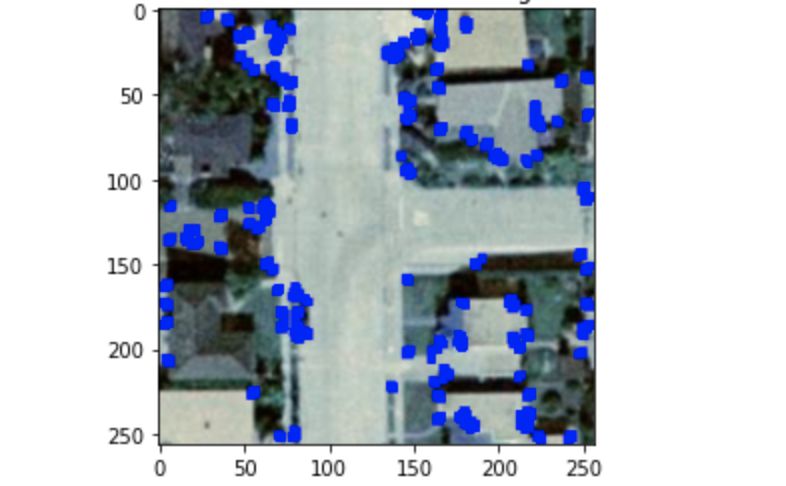
1.2 - Harris Detector to get Roads¶
In [5]:
def harris_det(img):
# get thresholds
ret,thresh = cv2.threshold(img,120,255,cv2.THRESH_BINARY_INV)
# dilation
kernel = np.ones((5,5),np.uint8)
img = cv2.dilate(thresh,kernel,iterations=2)
plt.imshow(img,cmap="gray")
plt.title("Dilated Image")
plt.show()
# erosion
kernel = np.ones((10,10),np.uint8)
img = cv2.erode(img,kernel,iterations=1)
plt.imshow(img,cmap="gray")
plt.title("Eroded Image")
plt.show()
# get corners
gray = np.float32(img)
dst = cv2.cornerHarris(gray,3,5,0.06)
plt.imshow(dst,cmap="gray")
plt.title("Harris - Edges and Corners")
plt.show()
dst = cv2.dilate(dst,None,iterations=2)
plt.imshow(dst,cmap="gray")
plt.title("Harris - Corners Dilated")
plt.show()
# overlay edges over original image
img_overlay_corners = img_rgb.copy()
img_overlay_corners[dst>0.01]=[0,0,255]
plt.imshow(img_overlay_corners,cmap="gray")
plt.title("Corners overlaid over Image")
plt.show()
In [6]:
harris_det(img_gray)





1.3 - Main Road Orientations w/ Hughes transform¶
In [7]:
img = cv2.imread(cv2.samples.findFile('UCMerced_LandUse/Images/intersection/intersection25.tif'), cv2.IMREAD_GRAYSCALE)
plt.imshow(img)
plt.show()
dst1 = cv2.Canny(img,100,20,None,3)
plt.imshow(dst1,cmap="gray")
plt.show()


In [8]:
# convert to RGB and Copy
cdst = cv2.cvtColor(dst1, cv2.COLOR_GRAY2BGR)
cdst_copy = np.copy(cdst)
In [9]:
# ?cv2.HoughLines
In [10]:
"""
# Manual Solution from Prati
lines = cv2.HoughLines(dst1, 1, np.pi / 180, 125, None, 0, 0)
if lines is not None:
for i in range(0,len(lines)):
rho = lines[i][0][0]
theta = lines[i][0][1]
a = math.cos(theta)
b = math.sin(theta)
x0 = a*rho
y0 = b*rho
pt1 = (int(x0 + 1000*(-b)),int(y0 + 1000*(a)))
pt2 = (int(x0 - 1000*(-b)), int(y0 - 1000*(a)))
cv2.line(cdst,pt1,pt2,(0,0,255),7,cv2.LINE_AA)
plt.imshow(cdst)
plt.show()
"""
# transorm lines
linesP = cv2.HoughLinesP(dst1, 1, np.pi / 180, 155, None, 50, 10)
# draw lines
if linesP is not None:
for i in range(0, len(linesP)):
l = linesP[i][0]
cv2.line(cdst_copy, (l[0], l[1]), (l[2], l[3]), (0,0,255), 7, cv2.LINE_AA)
plt.imshow(cdst_copy)
plt.show()

Exercise 2¶
In [11]:
train_path = "/home/simon/CDE_UBS/Image_Analysis/03_Image_Features/UCMerced_LandUse/Images"
train_classes = os.listdir(train_path)
In [12]:
# Extract Train and Test DFs holding paths and targets
x_paths_train = []
y_train = []
for train_class in train_classes:
# get files in train folders
files = os.listdir(train_path+"/"+train_class)
# shuffle list to get random 10 images
random.shuffle(files)
files = files[:10]
# append files with paths to dataset and Y label
for file in files:
x_paths_train.append(train_path+"/"+train_class+"/"+file)
y_train.append(train_class)
# create pd df
df_train = pd.DataFrame({"x_path":x_paths_train,"y":y_train})
x_paths_test = []
y_test = []
for test_class in train_classes:
# get files in train folders
files = os.listdir(train_path+"/"+test_class)
# shuffle list to get random 10 images
random.shuffle(files)
file = files[0]
y_test.append(test_class)
x_paths_test.append(train_path+"/"+test_class+"/"+file)
"""# append files with paths to dataset and Y label
for file in files:
x_paths_test.append(train_path+"/"+test_class+"/"+file)
y_test.append(train_class)"""
# create pd df
df_test = pd.DataFrame({"x_path":x_paths_test,"y":y_test})
In [13]:
def get_features(path):
img = cv2.imread(path)
textures = mt.features.haralick(img)
ht_mean = textures.mean(axis=0)
return(ht_mean)
In [14]:
# append texture
tex = []
for path in df_train["x_path"]:
tex.append(get_features(path))
df_train["x"] = tex
tex = []
for path in df_test["x_path"]:
tex.append(get_features(path))
df_test["x"] = tex
In [15]:
df_train.head(5)
Out[15]:
In [16]:
df_test.head(5)
Out[16]:
Create NN-CLass Model¶
In [17]:
x_train = df_train["x"]
x_train = [l.tolist() for l in x_train]
y_train = list(df_train["y"])
In [ ]:
In [18]:
model = KNeighborsClassifier(n_neighbors=7)
model.fit(x_train,y_train)
Out[18]:
In [19]:
pred = []
for x in df_test["x"]:
x = x.reshape(1, -1)
pred.append(model.predict(x))
df_test["y_pred"] = pred
In [20]:
c = 0
for path,y,y_pred in zip(df_test["x_path"],df_test["y"],df_test["y_pred"]):
plt.imshow(cv2.imread(path))
plt.title("True: "+y+" Pred: "+str(y_pred[0]))
plt.show()
c = c+1
if c==5:
break





In [ ]:
In [ ]: